

Posted on June 13 2016

אנקודרים סיבוביים משמשים בעיקר למציאת זווית ומהירות סיבוב של ציר. קיימים סוגים רבים של אנקודרים סיבוביים המחולקים לפי טכנולוגיות המדידה, סוג המוצא, קונפיגורציות מכאניות ועוד. בכתבה זו יפורטו הסברים על הסוגים השונים ומושגים
חשובים.
אנקודרים אבסולוטיים
האנקודר האבסולוטי מוציא נתון של הזווית שבה נמצא הציר בכל רגע נתון. הנתון אינו משתנה לאחר כיבוי והדלקת האנקודר.
עקרון הפעולה: הציר המסתובב מחובר לדיסקה בעלת קידוד. דרך הדיסקה מוקרן או לעבר תאים פוטואלקטריים. מזהים את המיקום (הזווית) של הדיסקה לפי הקוד שנקרא בתאים הפוטואלקטריים.
עקרון הפעולה: הציר המסתובב מחובר לדיסקה בעלת קידוד. דרך הדיסקה מוקרן או לעבר תאים פוטואלקטריים. מזהים את המיקום (הזווית) של הדיסקה לפי הקוד שנקרא בתאים הפוטואלקטריים.

כמות הקידודים, מורכבותם וכמות התאים הפוטואלקטריים קובעים את הרזולוציה של האנקודר. אנקודר ברזולוציה של 8 ביט לדוגמה יוציא ערכים בין 0, השווה לזוית 0 ו- 255, השווה לכמעט 360 מעלות. הרזולוציה תהיה 1.40625 מעלות, לפי חלוקת 360 מעלות ל-256 חלקים (28). אנקודר בעל רזולוציה של 12 ביט, לפי אותו חישוב ייתן רזולוציה של 0.088 מעלות. כאמור, נתון המיקום מתקבל מייד מהאנקודר, אך אם מעוניינים לקבל מידע על מהירות הסיבוב, יש לבצע נגזרת על הזווית לפי הזמן.
קיימים אנקודרים אבסולוטים שמחלקים את הרזולוציה על כמה סיבובים במקום על סיבוב אחד. אנקודרים אילו נקראים "Multi-turn". כדי שהאנקודר יפעל בצורה אמינה ב-Multi-turn, קיימת תמסורת מכאנית המורידה את כמות הסיבובים בעזרת גלגלי שיניים ומחוברת לדיסקת קידוד נוספת. כך האנקודר "יודע" את הזווית בכל רגע נתון וגם את מספר הסיבוב.
קיימים סוגים רבים של אנקודרים אבסולוטים, עם מוצא דיגיטלי מקבילי (Parallel), אנלוגי וסוגי תקשורים שונים.
קיימים אנקודרים אבסולוטים שמחלקים את הרזולוציה על כמה סיבובים במקום על סיבוב אחד. אנקודרים אילו נקראים "Multi-turn". כדי שהאנקודר יפעל בצורה אמינה ב-Multi-turn, קיימת תמסורת מכאנית המורידה את כמות הסיבובים בעזרת גלגלי שיניים ומחוברת לדיסקת קידוד נוספת. כך האנקודר "יודע" את הזווית בכל רגע נתון וגם את מספר הסיבוב.
קיימים סוגים רבים של אנקודרים אבסולוטים, עם מוצא דיגיטלי מקבילי (Parallel), אנלוגי וסוגי תקשורים שונים.
אנקודרים אינקרמנטליים
אנקודר אינקרימנטלי בדרך כלל מייצר סדרת פולסים בתגובה לתנועה סיבובית (או ליניארית באנקודרים ליניאריים). הפולסים הללו יכולים לשמש למדידת מהירות, על ידי מדידת התדר שלהם, או למדידת הזווית שבה נמצא הציר, בעזרת מונה פולסים או בקר מתוכנת PLC. יציאת הפולסים היא בדרך כלל שני גלים ריבועיים בהפרש פאזה של רבע
מחזור (90 מעלות), או אות סינוס וקוסינוס.

עקרון הפעולה: הציר המסתובב מחובר לדיסקה בעלת קווים. דרך הדיסקה מוקרן או לעבר תאים פוטואלקטריים. בזמן הסיבוב של הציר, התאים הפוטואלקטריים מוציאים גל סינוסואידי שמחזורו יחסי לאורך כל קו בדיסקה. גל הסינוס וגל הסינוס המוזז בהפרש פאזה (קוסינוס) מוגברים ונשלחים אל מוצא האנקודר באנקודרים עם יציאת סינוס/קוסינוס, או שעוברים "ריבוע" ויוצאים בתור אות של שני גלים ריבועיים (A,B). קיימים דגמים של אנקודרים שקיימת בהם הכפלה אלקטרונית פנימית לאותות הסינוס/קוסינוס לצורך הגדלת הרזולוציה. אם לדוגמה קיימת הכפלה אלקטרונית של פי 10, אז במקום פולס אחד עבור כל פס בדיסקה מקבלים 10 פולסים. ההכפלה מתאפשרת מכיוון מתחי הסינוס וקוסינוס תמיד יהיו ביחס מתחים חד-חד-ערכי בכל זווית.

תדר הפולסים נותן מייד את נתון מהירות הסיבוב. יש לשים לב שלפעמים היצרן מגדיר תדר מוצא מקסימלי שמותר להוציא מהאנקודר עקב מגבלות רוחב סרט של האלקטרוניקה. במקרה כזה יש צורך לחשב מה המהירות המקסימאלית המותרת, או לחילופין, מה כמות הפולסים בכל סיבוב שנבחר באנקודר. לדוגמה, אם באנקודר יש 5000 פולסים והוא מסתובב במהירות של 50 סיבובים בשנייה (שווה ערך לכ- 3000 RPM), אז תדר המוצא יהיה: Fout=50x5000=250KHz.
אם רוצים לדעת את הזווית, יש לספור את הפולסים. כיוון הספירה יתבצע בעזרת מונה מעלה/מטה שמזהה את כיוון הסיבוב לפי האות המקדים. כלומר, אם האות A מקדים את B, הסיבוב עם כיוון השעון ולהיפך. כדי לזהות את נקודת ההתחלה, יש פולס נוסך שמתקבל בזווית 0 ומשמש לאיפוס המנייה.
אם רוצים לדעת את הזווית, יש לספור את הפולסים. כיוון הספירה יתבצע בעזרת מונה מעלה/מטה שמזהה את כיוון הסיבוב לפי האות המקדים. כלומר, אם האות A מקדים את B, הסיבוב עם כיוון השעון ולהיפך. כדי לזהות את נקודת ההתחלה, יש פולס נוסך שמתקבל בזווית 0 ומשמש לאיפוס המנייה.

למעלה: השוואה בין עקרון פעולת אנקודר אבסולוטי ואינקמנטלי
קריאת הפולסים מאנקודר אינקרימנטלי
הרזולוציה, כמות הפולסים ותדר המוצא הם בעצם אותו מילים אחרות, או צורה אחרת להגדיר את מספר הפולסים לסיבוב.
כדי להגדיל את הרזולוציה מהאנקודר ניתן לבצע ספירה, לא רק של הפולסים, אלא את נקודות העליה והירידה של שני הפולסים. זה מתבצע בדרך כלל בעזרת מונה מתאים. ניתן לבצע הכפלה של פי 2 ופי 4 צעדים, מכיוון שבכל מחזור של פולס יש 4 החלפות מצב. להלן דוגמה של קריאת אנקודר בעל 1024 פולסים לסיבוב עם הכפלה פי 2 ופי 4:
כדי להגדיל את הרזולוציה מהאנקודר ניתן לבצע ספירה, לא רק של הפולסים, אלא את נקודות העליה והירידה של שני הפולסים. זה מתבצע בדרך כלל בעזרת מונה מתאים. ניתן לבצע הכפלה של פי 2 ופי 4 צעדים, מכיוון שבכל מחזור של פולס יש 4 החלפות מצב. להלן דוגמה של קריאת אנקודר בעל 1024 פולסים לסיבוב עם הכפלה פי 2 ופי 4:

דיוק
הרזולוציה של האנקודר היא איננה הדיוק שלו. הדיוק נקבע לפי איכות האנקודר, על פי מספר גורמים:
- הסטיה בייצור הקווים בדיסקה האופטית.
- סטייה בהתקנת הדיסקה ביחס לציר.
- סטייה רדיאלית של המיסבים.
- שגיאה הנובעת מההתקנה המכאנית.
- שגיאת האלקטרוניקה המבצעת דיגיטציה או הכפלת הסינוס/קוסינוס.
כאשר מדובר על דיוק אנקודרים אינקרימנטלים נהוג להשתמש ביחידות של זוית חשמלית (el°). מחזור אחד של פולס בודד הוא בעל 360 el°. אם נגדיר את כמות בפולסים לסיבוב (ppr) ב-N, אז בסיבוב שלם של האנקודר יהיו Nx360 el°.
לדוגמה, אם לאנקודר איכותי יש דיוק של ±50el°, זה אומר שכל גילוי קצה קו בדיסקה יכול לסטות מהמיקום התיאורטי שלו במקסימום 50/N מעלות. כך שאנקודר בעל 5000 פולסים לסיבוב ודיוק של ±50 el° ייתן דיוק של 0.01° מעלות מכאניות. אם משתמשים באנקודר אינקימנטלי לצורך בקרה על מהירת הסיבוב, השגיאה הנ"ל תתבטא בקפיצה מדומה במהירות (ripple).
הגדרת הדיוק כוללת בתוכה גם את המושג Channel-Separation – ההפרדה בין האות בערוץ A וערוץ B. כאמור שני האותות אמורים להיות בהפרש פאשה של 90el°. באנקודרים סטנדרטיים הכיול מתבצע להפרש פאזה של 90±25el°. זה אומר שהמרחק בין מיקום הפולסים יכול להיות בין 65el° ל- 115el°. האותות הריבועיים יהיו ב- Duty-Cycle (יחס בין מצב ON ו- OFF) של 50%, או 180el°. כל אנקודר שמיוצר אמור לעבור בדיקה של דיוק, הפרדת הערוצים ו- Duty-Cycle. הנתונים צריכים להישמר אצל יצרן האנקודרים עבור כל אנקודר, לפי המספר הסיריאלי שלו. המדידות של הנתונים מתבצעות בציוד מיוחד ובטמפרטורת סביבה של 20°C.
לדוגמה, אם לאנקודר איכותי יש דיוק של ±50el°, זה אומר שכל גילוי קצה קו בדיסקה יכול לסטות מהמיקום התיאורטי שלו במקסימום 50/N מעלות. כך שאנקודר בעל 5000 פולסים לסיבוב ודיוק של ±50 el° ייתן דיוק של 0.01° מעלות מכאניות. אם משתמשים באנקודר אינקימנטלי לצורך בקרה על מהירת הסיבוב, השגיאה הנ"ל תתבטא בקפיצה מדומה במהירות (ripple).
הגדרת הדיוק כוללת בתוכה גם את המושג Channel-Separation – ההפרדה בין האות בערוץ A וערוץ B. כאמור שני האותות אמורים להיות בהפרש פאשה של 90el°. באנקודרים סטנדרטיים הכיול מתבצע להפרש פאזה של 90±25el°. זה אומר שהמרחק בין מיקום הפולסים יכול להיות בין 65el° ל- 115el°. האותות הריבועיים יהיו ב- Duty-Cycle (יחס בין מצב ON ו- OFF) של 50%, או 180el°. כל אנקודר שמיוצר אמור לעבור בדיקה של דיוק, הפרדת הערוצים ו- Duty-Cycle. הנתונים צריכים להישמר אצל יצרן האנקודרים עבור כל אנקודר, לפי המספר הסיריאלי שלו. המדידות של הנתונים מתבצעות בציוד מיוחד ובטמפרטורת סביבה של 20°C.
באנקודרים אבסולוטים הדיוק מתייחס לסטייה המקסימלית מהמיקום (זווית) התיאורטי. היחידה שמשקפת את הדיוק היא למעשה הרזולוציה, או הביט האחרון במילה שבמוצא, LSB- Least Significant Bit. זאת משום שבדרך כלל באנקודרים אבסולוטים השגיאה הזו היא הדומיננטית. דוגמה: אנקודר בעל רזולוציה של 13 ביט (213 חלקים) השגיאה המקסימלית תהיה: 360°/8192 = ±0.04°.
אורך חיים של אנקודרים
אחד הגורמים העיקריים הקובעים את אורך החיים הוא איכות המיסבים בציר. גורמים נוספים שישפיעו על אורך החיים הם צורת החיבור לאנקודר, הכוחות המופעלים על הציר, מהירות הסיבוב, רעידות, טמפרטורה ולחות בסביבה וכו'.
כדי להעריך את אורך החיים שיתקבל בפועל יש לבדוק בנתוני היצרן את נתוני תנאי הסביבה ונתוני הכוחות המותרים.
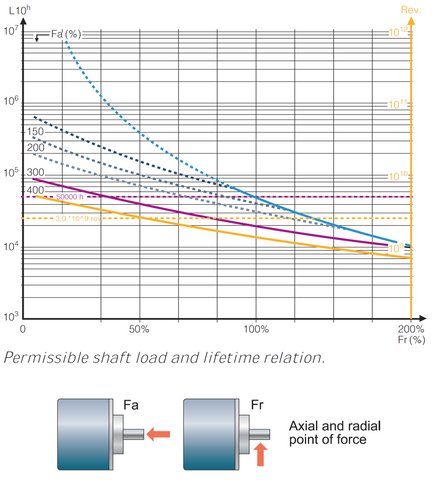
בדרך כלל צריכה להיות התייחסות לשני סוגים של כוחות: כוח אקסיאלי (Fa) וכוח רדיאלי (Fr). לדוגמה, אנקודר מסדרת 503, תוצרת Leine&Linde משבדיה מאפשר כוח רדיאלי (Fr) של 60N.
ניתן לראות בגרף הבא את השפעת העומס הרדיאלי והאקסיאלי על אורך החיים הצפוי של אנקודר זה. אם העומס האקסיאלי גדל, ניתן לראות לפי העקומות השונות איך אורך החיים הצפוי קטן. ציר ה-X מייצג את ההשפעה של הכוח הרדיאלי (Fr) על אורך החיים של האנקודר. המספרים הם באחוזים מהערך המקסימאלי המותר. כלומר אם מופעל על האנקודר 60N, יש להתייחס לערך של 100%, אך אך מופעל רק 30N (50%), ניתן לראות בגרף איך אורך החיים גדל בהתאם. אורך החיים מוגדר בגרף לפי שני פרמטרים: שעות עבודה בציר ה-Y השמאלי וכמות סיבובים בציר ה-Y הימני.
כדי להעריך את אורך החיים שיתקבל בפועל יש לבדוק בנתוני היצרן את נתוני תנאי הסביבה ונתוני הכוחות המותרים.
בדרך כלל צריכה להיות התייחסות לשני סוגים של כוחות: כוח אקסיאלי (Fa) וכוח רדיאלי (Fr). לדוגמה, אנקודר מסדרת 503, תוצרת Leine&Linde משבדיה מאפשר כוח רדיאלי (Fr) של 60N.
ניתן לראות בגרף הבא את השפעת העומס הרדיאלי והאקסיאלי על אורך החיים הצפוי של אנקודר זה. אם העומס האקסיאלי גדל, ניתן לראות לפי העקומות השונות איך אורך החיים הצפוי קטן. ציר ה-X מייצג את ההשפעה של הכוח הרדיאלי (Fr) על אורך החיים של האנקודר. המספרים הם באחוזים מהערך המקסימאלי המותר. כלומר אם מופעל על האנקודר 60N, יש להתייחס לערך של 100%, אך אך מופעל רק 30N (50%), ניתן לראות בגרף איך אורך החיים גדל בהתאם. אורך החיים מוגדר בגרף לפי שני פרמטרים: שעות עבודה בציר ה-Y השמאלי וכמות סיבובים בציר ה-Y הימני.
סוגים נוספים של אנקודרים
אנקודר טבעתי
לעומת אנקודר סיבובי עם ציר חלול, באנקודר עם מבנה טבעתי הסקאלה פונה לכיוון הרדיאלי של הסיבוב. היחידה האלקטרונית, או הראש הקורא מותקנים מעל הסקלה. היתרון במבנה כזה הוא שניתן לקבל רדיוס גדול וכן רזולוציה גדולה יותר לכל סיבוב.

אנקודרים מגנטיים
שיטה נוספת לייצור אנקודרים היא שיטה מגנטית. במקום חיישן אופטי ודיסקה עם קווים, משתמשים במגנט עם קטבים משתנים (צפון/דרום/צפון/דרום...). החיישן המגנטי קורא את הקטבים ומבצע עיבוד אותות בדומה לאנקודר האופטי. אנקודר סיבובי מגנטי אינקמנטלי הוא במבנה טבעתי בלבד.
קיימים גם אנקודרים מגנטיים אבסולוטיים. הם נקראים גם מדי זווית לפעמים, או אינקלינטורים. עקרון הפעולה הוא שימוש במגנט שמסתובב עם הציר ומערכת אלקטרונית שמזהה את זווית השטף המגנטי ומתרגמת אותו למוצא תקשורת או אנלוגי.
קיימים גם אנקודרים מגנטיים אבסולוטיים. הם נקראים גם מדי זווית לפעמים, או אינקלינטורים. עקרון הפעולה הוא שימוש במגנט שמסתובב עם הציר ומערכת אלקטרונית שמזהה את זווית השטף המגנטי ומתרגמת אותו למוצא תקשורת או אנלוגי.
אנקודר מגנטי אינקימנטלי תוצרת ASM

אנקודר מגנטי אבסולוטי תוצרת ASM
היתרונות בשימוש באנקודר מגנטי:
- עמידה בתנאיי סביבה לא נקיים, שעלולים לחסום את הקריאה באנקודר אופטי.
- גמישות בהתקנה – הראש הקורא או המגנט יכולים להיות רחוקים מהסקאלה כמה מילימטרים.
זאת לעומת אנקודר אופטי שיש צורך בדיוק התקנה גבוה יחסית של הראש הקורא.
החיסרון העיקרי באנקודר מגנטי הוא דיוק נמוך יותר. זאת מכיוון שקטבים המגנטיים מיוצרים במרווחים בסדרי גודל של מילימטרים, לעומת אנקודרים אופטיים שהמרחק בין הקווים יכול להיות בסדרי גודל של עשיריות או מאיות מילימטרים.
אנקודרים ליניאריים
אנקודר ליניארי דומה במבנה לאנקודר טבעתי, רק שהסקאלה היא ליניארית. אנקודרים ליניאריים יכולים להיות אופטיים או מגנטיים. במקרים שיש צורך לעבוד עם אנקודר אופטי בסביבת עבודה לא נקייה, ניתן לבחור אנקודר ליניארי סגור, המוגן בפני הסביבה הבעייתית.

אנקודר ליניארי "סגור" אופטי תוצרת RSF

אנקודר ליניארי "פתוח" אופטי תוצרת RSF

אנקודר ליניארי מגנטי תוצרת ASM – עקרון פעולה

אנקודר ליניארי מגנטי תוצרת ASM
קיימים אנקודרים מגנטיים ליניאריים אבסולוטיים שנותנים מידע על המיקום בכל רגע. האנקודר בנוי מיחידת סקלה ליניארית באורך שנבחר ומגנט שנע לאורך הסקאלה. החלק של החיישן נמצא בסקלה והוא בנוי במוביל גל אלקטרונגנטי ("גלבו"). כדי לקבוע את מיקום המגנט על הסקלה, משודר פולס זרם קצר לאורך מוביל הגל. פולס הזרם יוצר שדה מגנטי מעגלי סביב מוביל הגל הנע במהירות האור. מגנט המיקום יוצר הפרעה בשדה המגנטי הזה במיקום שבו הוא נמצא. הפרעה זו חוזרת לאורך מוביל הגל שבקצהו ממוקמת יחידה אלקטרונית שמודדת את הזמן בין שיגור פולס הזרם לבין קבלת ההחזר מהפרעת המגנט. המיקום נקבע לפי זמן זה, בדומה לעקרון פעולה של מכ"ם, או מד-טווח לייזר.

אנקודר מגנטי אבסולוטי תוצרת ASM – עקרון פעולה

אנקודר מגנטי אבסולוטי תוצרת ASM
סיכום
בבחירת אנקודרים יש להתחשב בגורמים רבים: סוג האנקודר: סיבובי, טבעתי או ליניארי, אנקודר עם ציר או חלול, טכנולוגיה מגנטית או אופטית, יציאה אבסולוטית או אינקרימנטלית. בחירת האנקודת תתבצע גם בהתאם לתנאי הסביבה בה אמור להיות מותקן האנקודר: דרגת IP, סביבה נפיצה (אנקודרים מוגני פיצוץ), רעידות והפרעות חשמליות ומגנטיות. איכות האנקודר חשובה מאוד ותתבטא בדרך כלל באורך חיים, עמידה ברעידות ללא יצירת הפרעות במוצא, אמינות ודיוק.
המקורות לנתונים בכתבה נלקחו מתוך ספרות טכנית של החברות:
הכותב:
עוז מעיין
מהנדס מכירות
מדיטל היי-טק (1992) בע"מ
Medital Vision
E-mail: vision@medital.co.il
Company Tel: 073-2000250
Oren Zoldan
Mobile: 054-4792930
E-mail: orenz@medital.co.il
Direct Tel: 073-2000224
Yaron Sheratzky
Mobile: 054-6889102
E-mail: yaron.sh@medital.co.il
Direct Tel: 073-2000219
Or Kuperman
Mobile: 054-2210280
E-mail: or.k@medital.co.il
Direct Tel: 073-2000242
E-mail: vision@medital.co.il
Company Tel: 073-2000250
Oren Zoldan
Mobile: 054-4792930
E-mail: orenz@medital.co.il
Direct Tel: 073-2000224
Yaron Sheratzky
Mobile: 054-6889102
E-mail: yaron.sh@medital.co.il
Direct Tel: 073-2000219
Or Kuperman
Mobile: 054-2210280
E-mail: or.k@medital.co.il
Direct Tel: 073-2000242